What is FRC? FRC stands for FIRST Robotics Competition, where students Design, Build, and eventually Compete with an actual robot. This is an opportunity for teenagers to develop a wide range of life skills, from turning a screwdriver in the correct direction to Programming robot code to even developing Business skills.
But what does that really mean?
BUILD SEASON (January-March)
At the beginning of every year, the robotics season kicks off! Teams worldwide jump into a flurry of design and innovation. The official “Kickoff,” Informs teams what to expect when playing for the upcoming year. Past events have included robots moving cubes, shooting balls, climbing rungs, launching frisbees, or even transporting and scoring gears. But in order to do anything, you have to start small.
1. Design
Once we have our objective in mind, we start brainstorming ways to complete the tasks. We start by drawing simple designs.
2. Basic Prototype
After we’ve thought up a few ideas, we start making some mockups out of cardboard, paper, tape rubber bands, and straws. Whatever it takes to ensure that our designs might actually work.

3. Advance Prototype
After having a basic idea of what we want, we prototype some more!
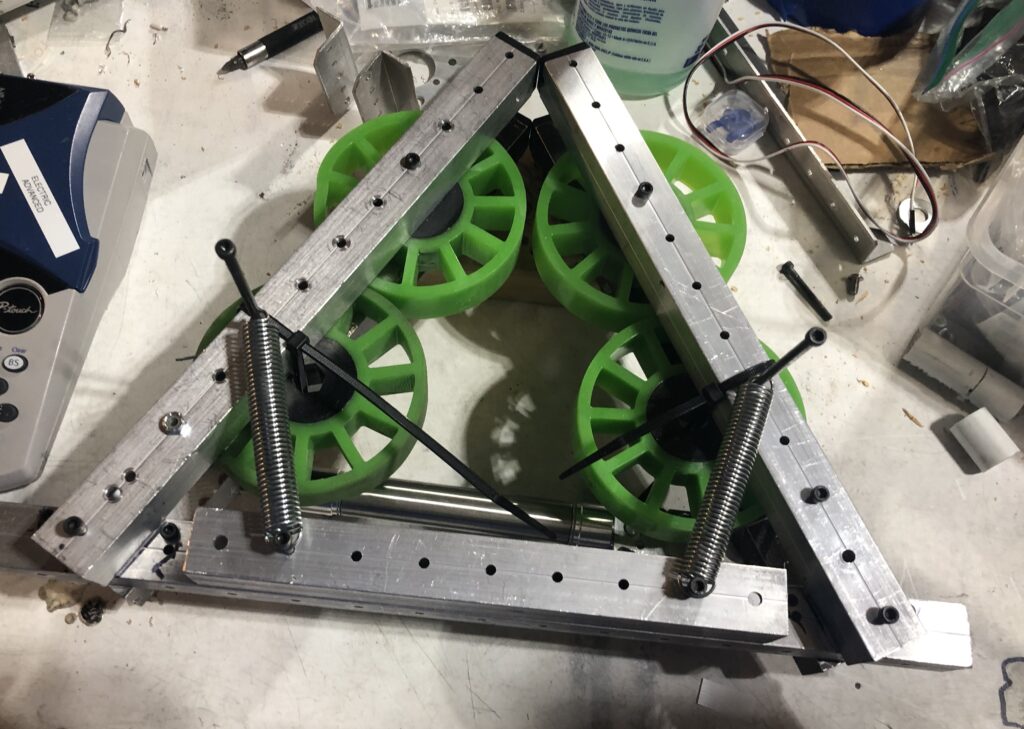
- Instead of using cardboard and paper, we use scrap pieces of metal, plastic, wheels, and some bolts and nuts to hold everything together.
- The reason we prototype is so that we can get as close to the final thing as possible. In this stage, nothing is final because we still don’t know what will work and what won’t.
- If one idea doesn’t work, then we have other ideas to fall back to, and it means we haven’t spent too much time or money on a part that won’t work.
4. CAD
From the beginning of the build season, we have a group using CAD (Computer Aided Design)
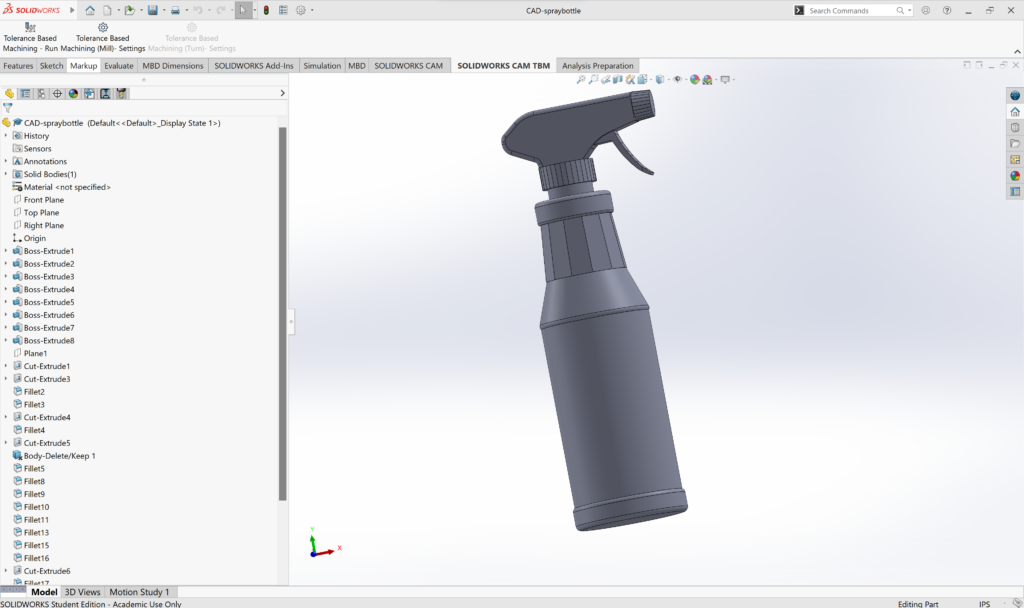
- Using CAD, you can design objects such as arms on a robot, an intake for a ball, or a climber.
- This is a faster way to make sure everything fits together without even getting your hands dirty.
- CAD is a vital step in any build session because it helps us catch problems we might have in the building design so we can avoid them when we’re actually putting robot pieces.
5. Final Design
After we’ve finalized a plan for what we want on our robot, we start the final design.
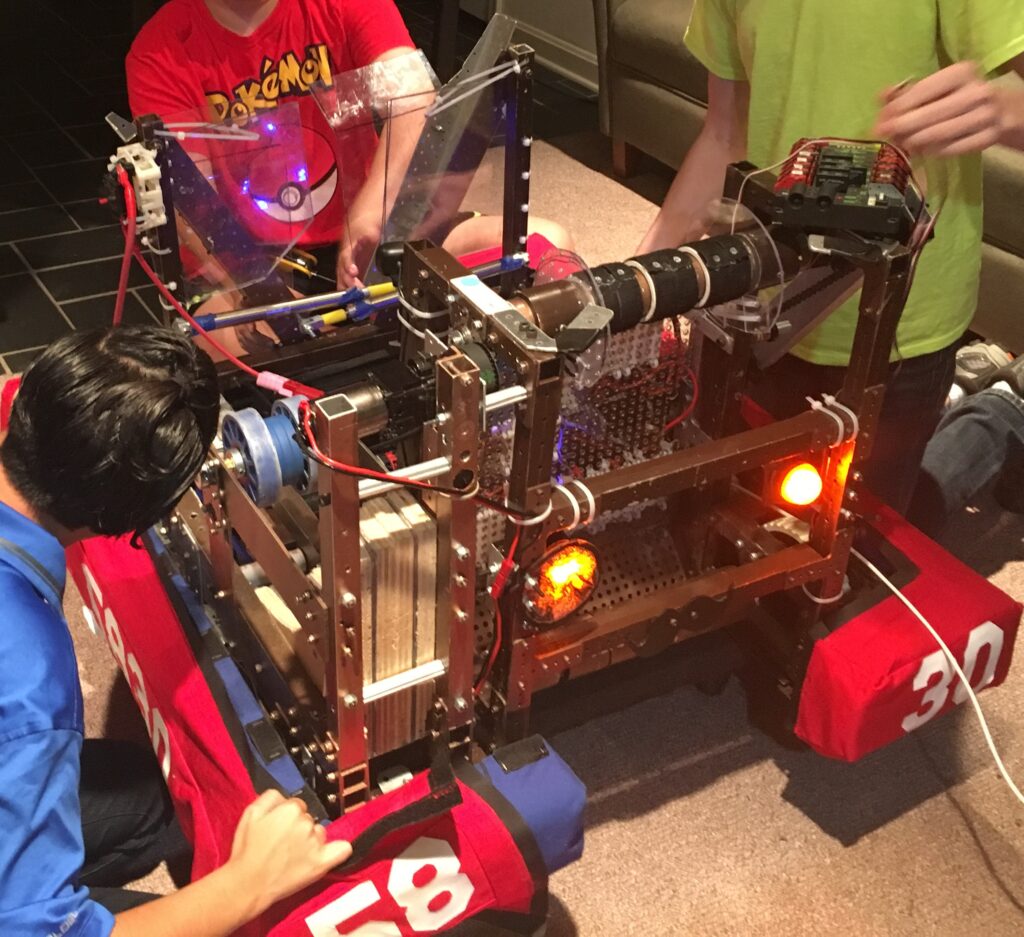
- The final design involves cutting materials to the correct length (Measure twice, Cut once)
- Drilling holes and bolting everything together
- Attaching motors and belts/chains to move everything
- It could also mean using pneumatics (pistons that run with air)
- At this point, we also start wiring up the robot, connecting motors to be powered by a battery
While that sounds easy, it can be harder than one would expect. It involves lots of problem-solving, and it’s a guarantee that someone will have to cut that one piece yet again.
6. Coding
Just because the robot is put together doesn’t mean it magically works!

- Our code team also starts at the beginning of the season
- They try to anticipate what type of code we’ll need and program it to what we need a motor or piston to do.
- The code team enables the robot to drive when you move a joystick or shoot when you push a button.
- It’s important to get the robot building done pretty quickly so that we can give the coding team to work out any kinks or errors we might have.
7. Testing
This step goes hand in hand with coding because we must ensure our robot is in top shape before the competition.
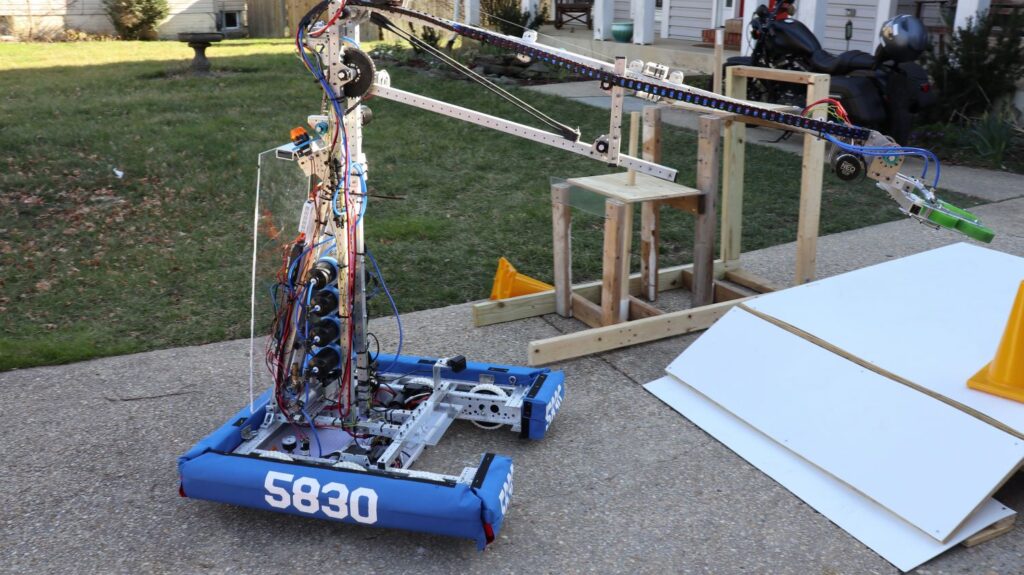
- Team members practice driving the robot.
- We test whatever arm, shooter, intake, or climber we have.
- We practice the most efficient way to score points in the upcoming competition.
COMPETITION
(February-March)
After building our robot, we finally get to try it out in a competition against other teams! Competitions take place on both Saturday and Sunday and involve around 20-30 other robotics teams that have followed the same steps above, but every robot is different and brings different qualities to the competition.
Competition explained:
Each competition has around 20-30 games each day.
In a game, teams are randomly put together in a group of three called an Alliance. A game consists of two Alliances (Six teams total per game), one Alliance against the other.
Each team has a robot, so six robots play in each match. Robots start on the field and are driven around in order to score points.
Game Layout:
Que: Till the next game ends
Robot field setup: ~5 minutes
Auto: 15 seconds
Teleop: 2 minutes 15 seconds
Then the next game starts
Auto (Autonomous)
As soon as the game officially starts, robots enter Autonomous mode. This is where, for the first 15 seconds of the game, robots run solely on code. Robots are programmed ahead of time to score points during Auto. After Autonomous, the Teleoperated period starts.
Teleop (Teleoperated)
When the Teleop period starts, robots are driven wirelessly by human drivers from each team. Alliance members work together to gain points and defend against the opposing Alliance. Scoring points could include shooting a ball into a hub or putting a cone on a peg. There are also special opportunities to acquire “Ranking points.” These points give a team a better rank

At the end of the two-minute and 30-second games, the robots turn off, and the judges assess and add up all the points in the game to determine the winning Alliance. At the end of a match, your Rank could go up or down depending on how many ranking points your Alliance scored.